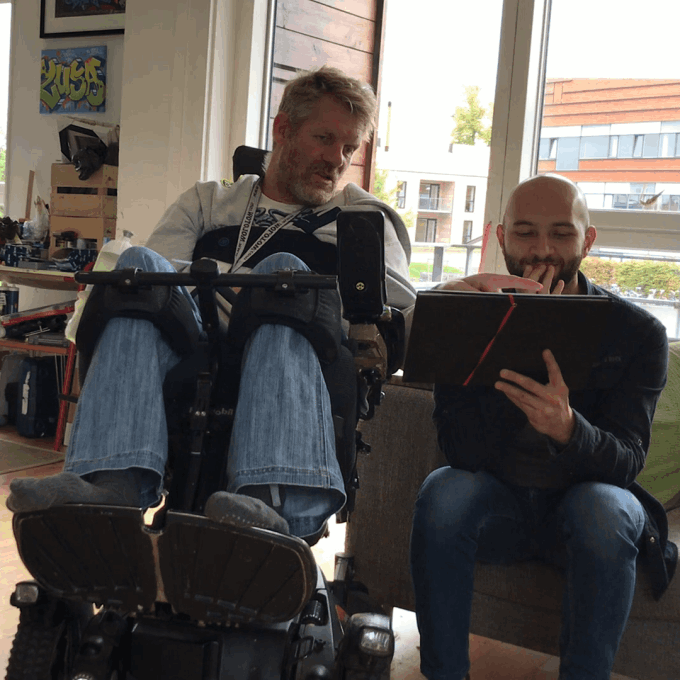
the mapping between the joystick and the pointer is completely natural, this lowers incredibly the amount of user's memory to use it; but also Anders was already used to the wheelchair joystick, that means using the same controller for another task would avoid him to learn a new controller.
Still, Anders told me he preferred the Touchbuttons controller.
No lies, this has been a setback for my project, so I started again looking for other people to test with or different solutions. What I found looking on a wonderful facebook community of makers and assistive technologies was some people asking for specific assistive solutions for themselves or their relatives and then some other people, mostly makers, answering them with sort of custom solutions. What I realized was the need for a platform where people in need can ask and those with knowledge can make custom solutions.
Unfortunately, it was late in the project to develop and test a platform but I decided to move a step forward with the controller and from the design to help one I moved the help many.
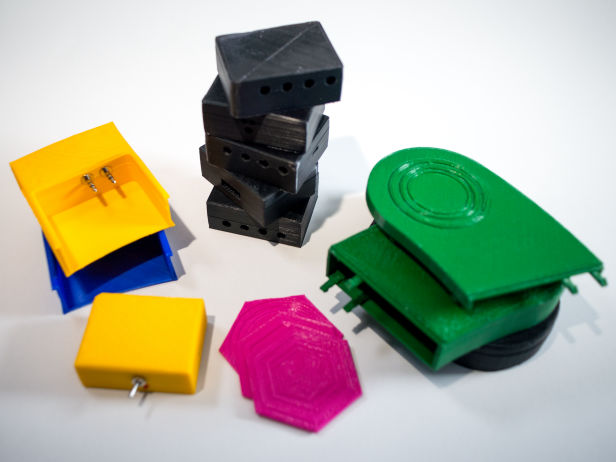
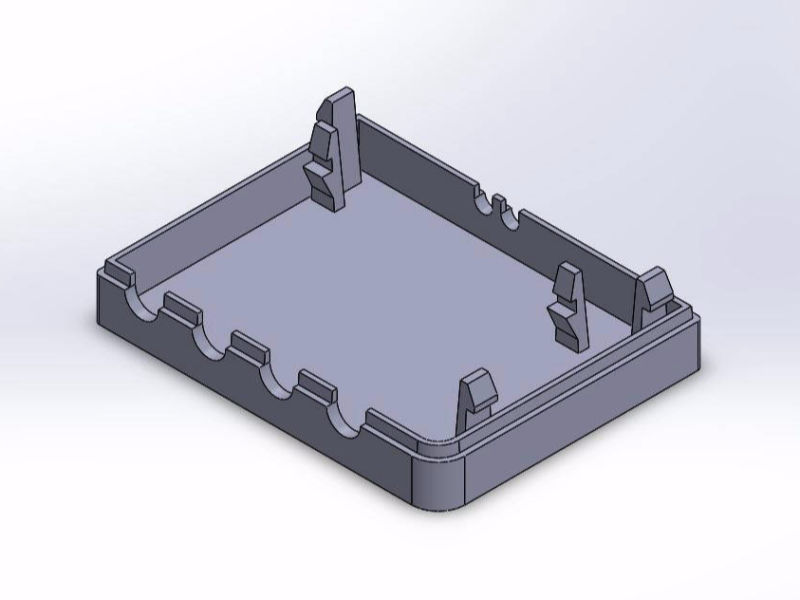
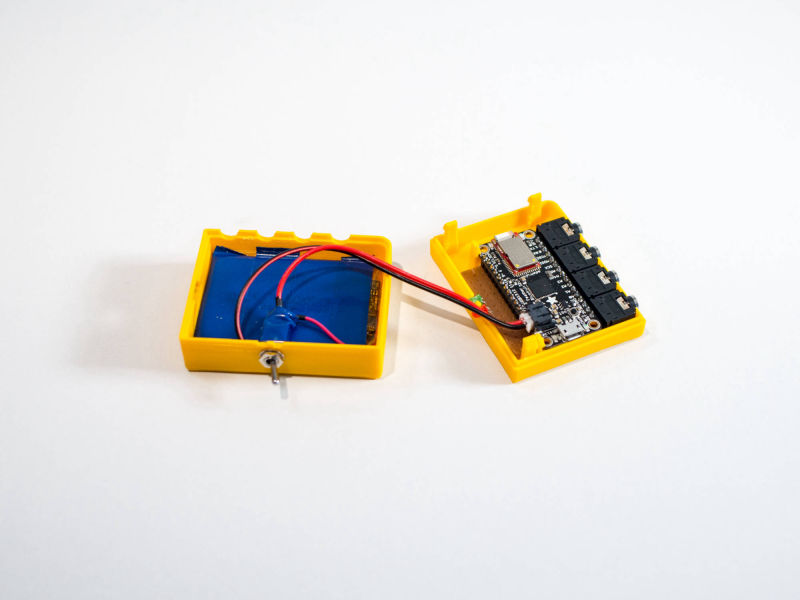
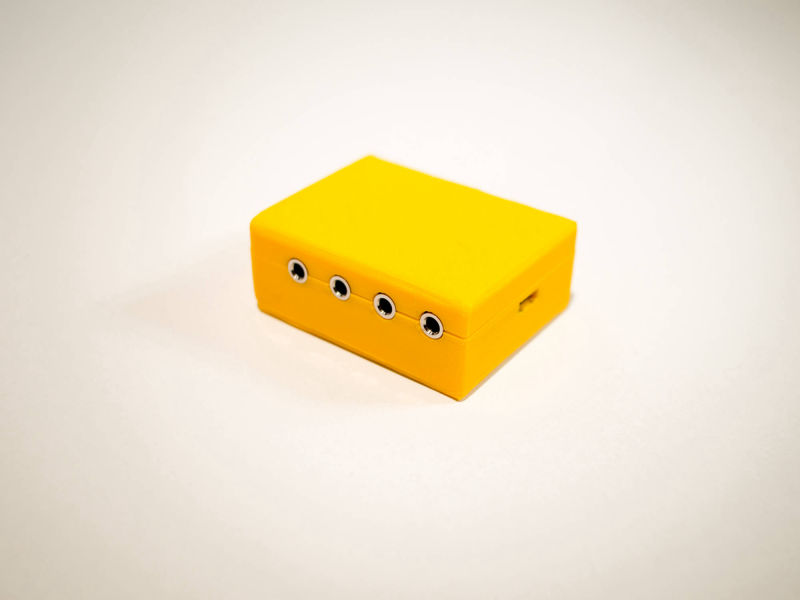
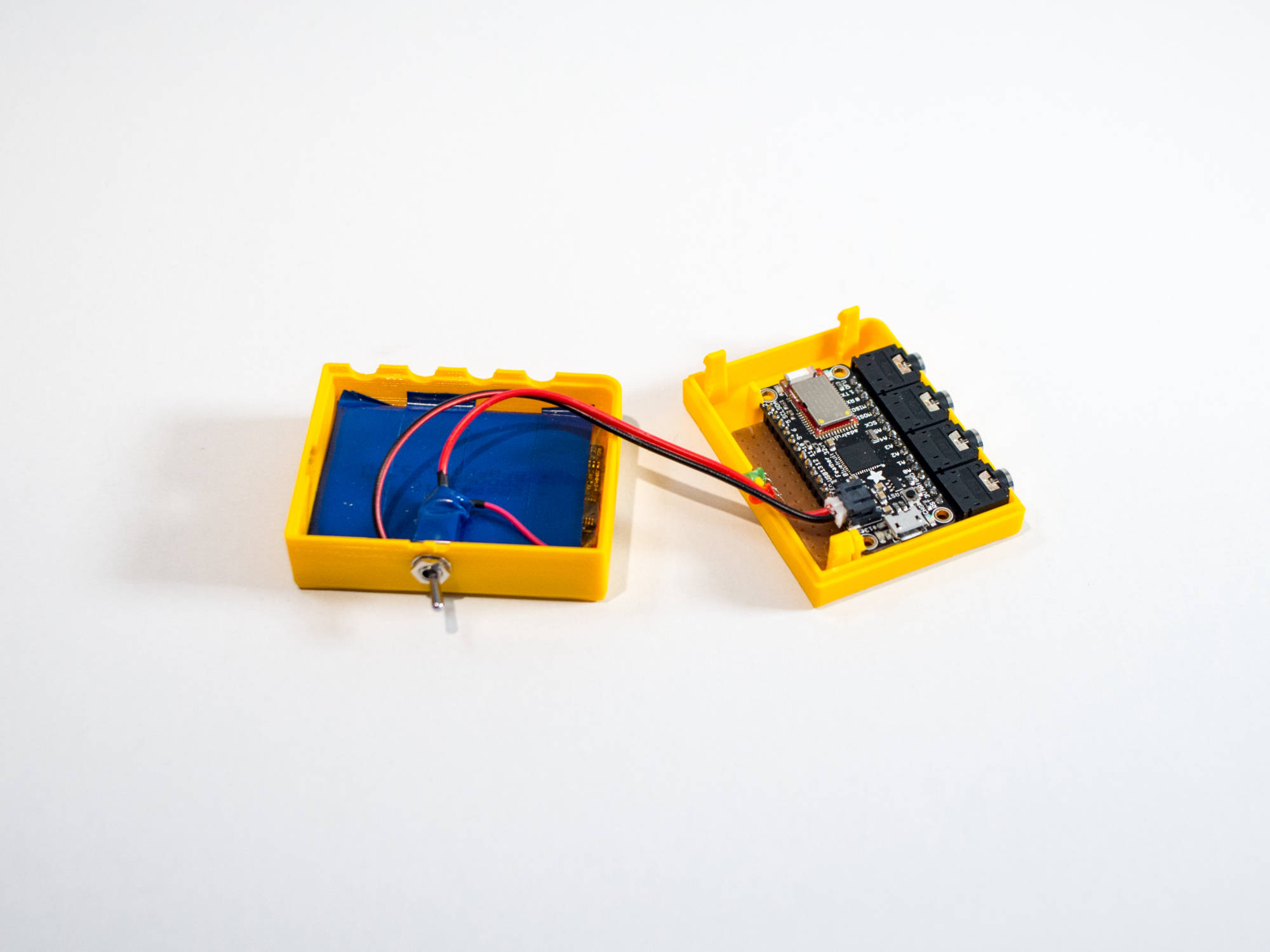
So the new concept of the controller was split in two parts: the main part, called the brain, where all the computational and communication part happen and a controller connected to the brain, based on the one that Anders highlighted as the best of those we tested. The point of having a modular system is to makes it easier to design new controllers that only need to fit with the main part and to makes the brain compatible with the majority of the adaptive controllers already existing on the market. But also this will makes it easier to upgrade the controller along with the progression of the disease.